INTRODUÇÃO E BREVE HISTÓRICO

Me chamo André Corrêa, sou aeromodelista desde 2008, e acumulo aproximadamente 16 anos de vivência, a maioria deles dedicados ao aeromodelismo elétrico. Por que não gosto de modelos a combustão? De jeito nenhum! Simplesmente porque nunca coube na minha realidade.
Nos primeiros anos, meus pequenos elétricos construídos com isopor de papelaria, bandejas de frios e longarinas de bambu, cabiam no orçamento da família. Hoje, enfermeiro, com pouco tempo disponível e morando em um apartamento, não posso perder tempo com regulagens, limpeza e manutenções prolongadas, ou contaminar o ambiente com cheiro de combustível.
O elétrico sempre foi, e sempre será minha essência no hobby/esporte; e acho importante passar para frente um pouco do que sei.
O aeromodelismo elétrico começou a se popularizar com pequenos modelos que utilizavam motores escovados com caixas de redução, um dos mais famosos, sem dúvidas, foi o Slow Stick da GWS. Todavia, no meio da década de 2000, os motores brushless começaram a se popularizar no meio do modelismo, promovendo uma verdadeira revolução no hobby/esporte. No início, eram motores pequenos, mas rapidamente os equipamentos cresceram e baratearam.

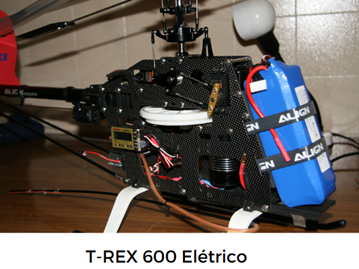
No ano de 2006, quando ainda não existiam sistemas High Voltage (HV), foi lançado o T-Rex 600E, que voava com bateria 6s e um motor Align que entregava aproximadamente 1,5 hp. Em 2008 foi lançado o T-Rex 700 Nitro e o então projetista da Align, Jason Krause, afirmou que não existiria um 700 elétrico. Hoje, helicópteros Nitro estão virando raridade nas pistas.
Atualmente já temos modelos de todos os tamanhos com motorização elétrica, dos micro aos giant. Até mesmo para os famosos aeromodelos 3D das classes 35% e 42% já existe motorização elétrica. Recentemente, tivemos um campeão da categoria ilimitada do IMAC com um modelo 42% de escala com motorização elétrica!

MOTORES ESCOVADOS E SEM ESCOVA | BRUSHED E BRUSHLESS
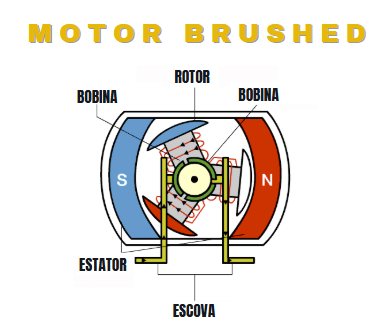
O nosso estudo dos motores se inicia com os motores escovados. Até hoje, muito comuns nos famosos carrinhos de controle remoto vendidos por lojas de brinquedos. Quem já teve um desses na infância e teve a curiosidade de montar, vai se lembrar muito bem desse motor: uma carcaça metálica cinza, com dois fios e um eixo; cilíndrico, ou com duas laterais achatas e duas arredondadas.

É um motor simples, barato e construído pela indústria há muitas décadas para as mais diversas aplicações; na sua casa provavelmente existem alguns desses motores, no seu computador, na sua máquina de lavar, no seu microondas... Mas, apesar de simples e barato, é um motor pesado e pouco eficiente.
O aeromodelismo demandava um motor mais leve e mais eficiente, que entregasse mais consumindo menos. O projeto brushless era perfeito.
Muitas pessoas ainda associam modelos elétricos à modelos pequenos, muitas vezes brinquedos.
O nosso exemplo de brushless acima é um Emax Rotomax 150, equivalente à um motor gasolina 150CC. Já temos a tecnologia para desenvolvermos projetos elétricos giant. Ainda peca em questões como autonomia e preço, mas como já vimos anteriormente, a evolução dos elétricos é constante e extremamente veloz!

Essa arquitetura gera um problema óbvio: com os estatores girando, é impossível realizar a transmissão de energia através de fiação; com o rotor em movimento, os fios seriam enrolados e o motor simplesmente não funcionaria.
Para resolver o problema, entram em ação as escovas; peças que ficam em constante atrito com o rotor transmitindo a energia para as bobinas. Mas, dessa solução, emergem dois grandes problemas: baixa eficiência e atrito. As escovas não são a solução mais eficiente de se realizar a transmissão de energia e, além disso, por ficarem em constante atrito, desgastam-se e precisam ser substituídas com frequência.
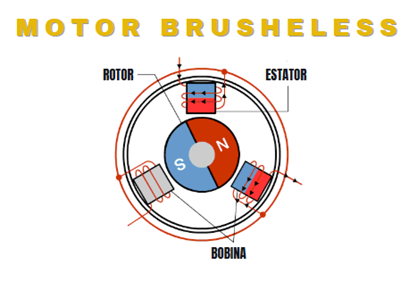
Os motores brushless inverteram a arquitetura. Colocaram em movimento os polos juntamente com o eixo, e fixaram as bobinas que, em conjunto, formam o estator. Apesar de ainda haver atrito e desgaste de componentes, este foi reduzido consideravelmente, nada comparado ao sistema de escovar, e a eficiência aumentou consideravelmente. Todavia, não existe almoço grátis, são motores mais caros que os escovados.
ESTRUTURA
A estrutura dos motores brushless é relativamente simples, são dois componentes principais, com seus anexos. O primeiro desses componentes é o estator, composto pelas bobinas; em anexo temos rolamentos e o montante, além dos fios que saem para o ESC; o outro grande componente é o rotor, composto por uma carcaça com os imãs aderidos e um eixo.

Alguns aspectos dessa estrutura podem sofrer alteração, como estrutura do estador e do rotor, bem como posicionamento dos mesmos e do montante. Todavia, os componentes estão presentes em todos os motores bushless.
ARQUITETURAS: INRUNNER E OUTRUNNER
Existem, essencialmente, duas classes de motores brushless: inrunner e outrunner. Inrunners, via de regra, são motores de KV mais alto, e trabalham com uma RPM maior e hélices menores, entregando mais velocidade final em detrimento da tração; ao passo que os outrunners, via de regra, entregam menos RPM, trabalham com hélices maiores e entregam mais tração em detrimento da velocidade final. Mas a principal diferença entre os dois é estrutural.
Um motor inrunner tem, aderido à sua carcaça, o estator, composto pelas bobinas e. ao centro, um rotor composto pelos polos e pelo eixo. Uma estrutura que lembra bastante os motores escovados; de mesmo modo que estes, temos uma carcaça fixa e, em movimento, vemos apenas o eixo.
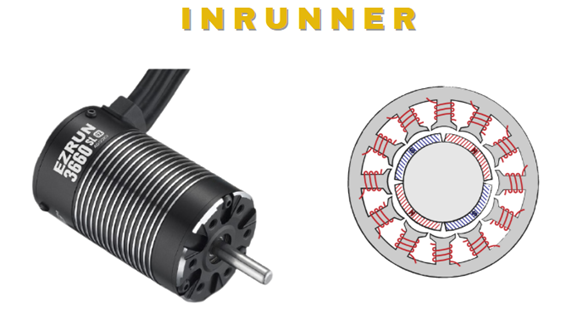
Já os outrunners têm, ao centro, o estator; e, em movimento ao redor, o rotor aderido à carcaça externa. É a arquitetura clássica de um 2822, onde vemos o eixo se movimentar junto com toda a carcaça do motor.

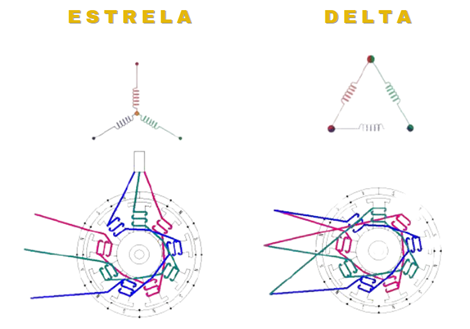
ENROLAMENTO: DELTA E ESTRELA
Existem inúmeras maneiras de enrolar fios dentro de um motor. Todavia, destacam-se dois tipos de enrolamento: em estrela (ou "Y") e delta.
De forma bem simplificada, motores enrolados em estrela são um pouco mais eficientes, mas é um enrolamento mais difícil e caro de ser feito, de modo que são motores com um valor agregado maior. Já os motores enrolados em delta são um pouco menos eficientes, pois é um enrolamento mais simples e barato de ser feito, e os motores são um pouco mais baratos.
É importante destacar que ESCs de marcas premium costumam trabalhar melhor com motores enrolados em estrela; alguns demandam uma programação extra para trabalharem bem com motores enrolados em delta.
NOMENCLATURA
A nomenclatura dos motores brushles causa dúvida em muitas pessoas, mas é uma questão bem simples de ser entendida. Via de regra, é composta por 4 dígitos: A primeira dezena diz respeito ao diâmetro do estator, ao passo que a segunda diz respeito ao comprimento, ou altura do estator; sempre em milímetros. Um 2822 possui um estator de 28 milímetros de diâmetro por 22 milímetros de comprimento.
Importante: são medidas em milímetros do ESTATOR. É necessário desmontar o motor e, no ato da medida, desconsiderar a carcaça metálica, medindo apenas o estator.

RPM POR VOLT: KV
Este talvez seja o ponto mais controverso envolvendo os motores brushless, o famoso KV dá nó na cabeça de muita gente. Muitos ainda acreditam, erroneamente, que KV diz despeito à potência do motor. Os motores, assim como chuveiros, microondas, geladeiras e quaisquer outros equipamentos elétricos, têm sua potência medida em watts. KV nada mais é do que uma referência de RPM.
Muitos ainda acreditam que um motor de 4.000 KV é mais potente que um motor de 850KV, simplesmente por ter "mais KV". E não é uma regra. Podemos sim ter um motor de 4000kv mai potente que um motor de 850kv, mas o contrário também é válido; temos diversos exemplos de motores de 850, 500, até mesmo 250 KV muito mais potentes que um motor de 4.000 KV.
O KV, uma referência de RPM, nada mais é que uma constante de tensão, que pode ser expressa em uma equação simples: RPM = KV x VOLT
Todavia, a realidade não é traduzida em uma equação simples, outros dados precisam ser levados em consideração; um deles, é a influência da hélice, seu peso e arrasto. Se utilizarmos uma hélice menor (tanto em diâmetro quanto em passo), a RPM do motor tende à aumentar; e se utilizarmos uma hélice maior (tanto em diâmetro quanto em passo), a RPM do motor tende à diminuir. De mesmo modo, se substituirmos uma 16x10 de madeira por uma 16x10 de carbono, a RPM também tende à aumentar, pois a hélice de carbono é mais leve. E acreditem, motores elétricos são muito sensíveis à alterações na hélice; uma pequena alteração pode melhorar ou piorar muito o desempenho do motor.
Apesar de relevante, dados de influência de hélice não são tão acessíveis, mas podemos inserir outro dado importante: a eficiência. Eficiência, uma relação entre "power in" e "power out", quanta energia entra e quanto de potência o motor entrega; perdas podem ocorrer por atrito, calor, etc; o maior ganho de eficiência dos motores brushless sobre os brushed foi por conta do menor atrito entre componentes; todavia, nenhum motor é 100% eficiente e é um dado á ser considerado.
Outra característica dos motores brushless é a perda de potência com o progredir do voo. A tensão as baterias LiPo, como veremos adiante, não é estabilizada. Conforme drenamos a carga de uma LiPo, sua tensão cai progressivamente; como existe uma relação direta entre tensão e RPM do motor, a RPM máxima desenvolvida depende diretamente da tensão fornecida à ele.
Sabendo das perdas por influência da hélice, da eficiência do motor e da tensão da bateria, o KV é uma referência teórica da RPM final do motor. Apesar de teórica, apresenta-se como muito fidedigna para dimensionamento dos nossos projetos.
Tomemos como exemplo, o motor fictício 4535 de 500KV dimensionado para 12s (44V nominais):
44V x 500KV = 22000RPM
Agora, podemos considerar outro motor fictício, um 4025 de 1000KV dimensionado para 6s (22V nominais):
22V x 1000KV = 22000RPM
Caso fossem reais, seriam motores para modelos bem diferentes. O 4535 seria um motor maior, que trabalharia com hélices maiores. Todavia, ambos entregam a mesma RPM final. KV, definitivamente, não é uma medida de potência.
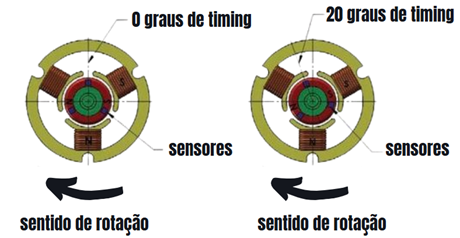
TIMING: AJUSTE AVANÇADO
O KV possui mais um desdobramento, uma forma de induzir alteração no KV do motor: o Timing. Em um certo posicionamento dos polos em relação às bobinas, o ESC entra em ação enviando um impulso para as bobinas, energizando-as, repelindo o polo e gerando movimento no rotor. Podemos considerar esse ponto como 0º de timing. À medida em que adiantamos esse momento, em 10º, 15º, 20º, 25º etc, induzimos um aumento de KV do motor e, respectivamente, aumento da RPM final.
Se induzimos um aumento de KV e, consequentemente, um aumento de RPM, aumentamos também o consumo do motor. Antes de realizar esta alteração via ESC, é necessário ter em mente que o mesmo pode ser sobrecarregado, devemos utilizar um equipamento corretamente dimensionado para esta alteração.
ESC – ELECTRONIC SPEED CONTROLLER: COMO FUNCIONA
Um ESC (Electronic Speed Controller) de motor brushless é um componente essencial em sistemas de propulsão que utilizam motores brushless; é basicamente o cérebro do sistema, ele quem descodifica o sinal recebido e transforma em algo interpretável pelo motor.
Entrada de Sinal: O ESC recebe um sinal de controle do receptor, geralmente um sinal PWM (Pulse Width Modulation) proveniente de um transmissor de rádio. Esse sinal define a velocidade desejada do motor.Na sequência, energiza a bobina A negativamente, e a bobina C positivamente, deixando B desligada.
Interpretação: O ESC interpreta esse sinal e converte-o em comandos que regulam a potência fornecida ao motor.
Comutação de Fases: Em um motor brushless, não há escovas que comutam a corrente. Em vez disso, o ESC desempenha o papel de comutador, alterando eletronicamente a corrente nos enrolamentos do motor. O ESC envia sinais elétricos sequenciais para as diferentes bobinas (fases) do motor brushless, criando um campo magnético rotativo que faz o rotor girar. A velocidade do motor é controlada ajustando a duração e a sequência dos pulsos elétricos que o ESC envia para as bobinas. Isso é feito pela modulação da largura do pulso (PWM), onde a duração do pulso determina a quantidade de energia fornecida ao motor. O ESC ajusta constantemente o timing da comutação para garantir que o motor opere de forma eficiente, com o máximo torque e velocidade desejados.
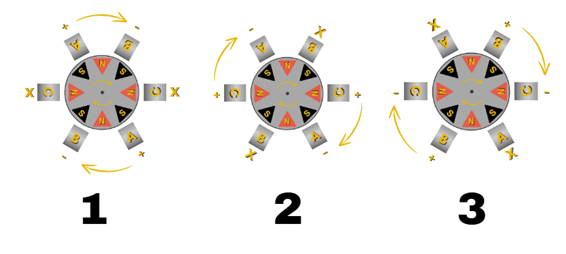
Imagine que você tenha um motor brushless com três pares de bobinas, denominados A, B e C.
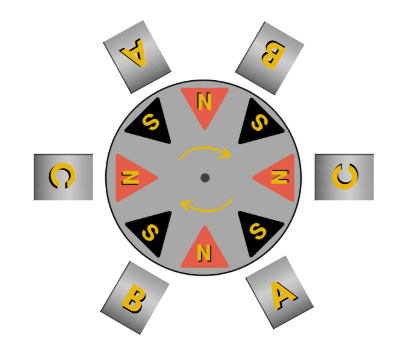
Primeiro o ESC energiza a bobina A positivamente e a B negativamente, deixando C desligada.
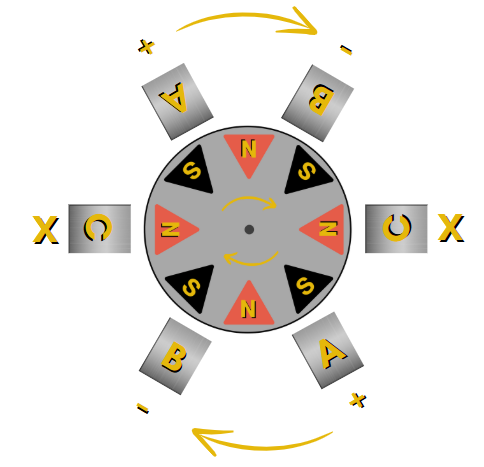
Na sequência, energiza a bobina A negativamente, e a bobina C positivamente, deixando B desligada.

Então, o ESC energiza a bobina C negativamente e a bobina B positivamente, deixando A desligada.
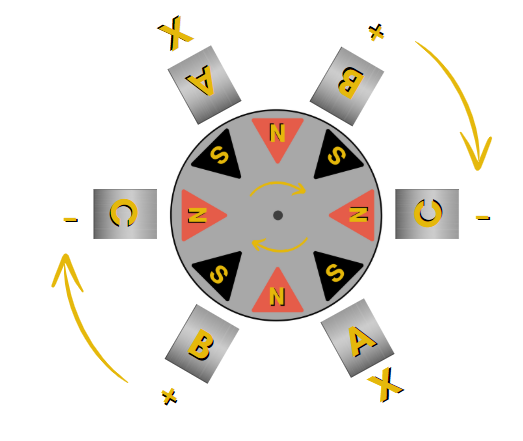
Esse processo contínuo de energizar as bobinas em diferentes combinações cria um campo magnético rotativo que mantém o motor girando. A velocidade do motor é controlada ajustando a frequência dessa comutação.
TIPOS DE ESC
ESC com BEC
O BEC (Battery Elimination Circuit) é um componente que pode estar integrado ao ESC (Electronic Speed Controller) ou ser um módulo separado. Sua função principal é fornecer uma tensão regulada e segura para receptor e servos, sem a necessidade de uma bateria adicional dedicada a esses componentes.
Normalmente, as baterias de voo fornecem uma tensão muito alta para ser utilizada diretamente pelos componentes eletrônicos. O BEC reduz essa tensão para um nível adequado (geralmente 5V ou 6V), permitindo que o sistema funcione corretamente sem sobrecarregar os componentes.
Em resumo, o BEC dentro do ESC permite que o aeromodelo opere de forma mais simples e eficiente, eliminando a necessidade de uma bateria separada para os eletrônicos, ao mesmo tempo que regula a tensão para garantir a segurança e a operação adequada dos componentes sensíveis. A maioria dos ESCs disponíveis no mercado contam com BEC integrado.
ESC OPTO
Alguns ESCs disponíveis no mercado não possuem BEC integrado, de modo que faz-se necessário o uso de uma bateria dedicada somente ao ESC e ao motor, e outra bateria, de menor tensão, dedicada somente à receptor e servos.
Os ESCs sem BEC integrado, são denominados OPTO. O termo "OPTO" refere-se ao uso de optoacopladores ou optoisoladores no ESC, que isolam eletricamente a parte de controle (que se conecta ao receptor) da parte de potência (que se conecta ao motor e à bateria).
Essa separação ajuda a proteger o receptor e outros eletrônicos contra possíveis interferências ou picos de tensão provenientes da parte de potência do ESC. Esses ESCs são frequentemente utilizados em setups de alta potência ou em situações onde a interferência elétrica precisa ser minimizada, proporcionando maior segurança e confiabilidade ao sistema.
ESC HV
Alguns modelos demandam a utilização de setups 12s (44.4V). Para essas tensões elevadas (high voltage - HV), são utilizados ESCs projetados especificamente para suportar altas tensões, são os chamados HV. Geralmente são OPTO e possuem valor bem superior aos não HV.
🔹 Créditos
Este artigo foi escrito por André Corrêa, do canal Idle Up, um dos maiores especialistas em aeromodelismo elétrico no Brasil.
📌 Quer continuar aprendendo sobre aeromodelismo?
🔴 Assine o PORTAL RBO e fique por dentro das novidades do hobby!